choppere-en generel introduktion
choppere
en chopper er dybest set en dc til dc-konverter, hvis hovedfunktion/brug er at skabe justerbar dc-spænding fra faste dc-spændingskilder ved hjælp af halvledere.
typer af choppere
hovedklassificeringen af typerne af choppere er angivet i et andet indlæg. Tag et kig-typer af CHOPPER kredsløb
der er to typer af choppere – AC og DC.
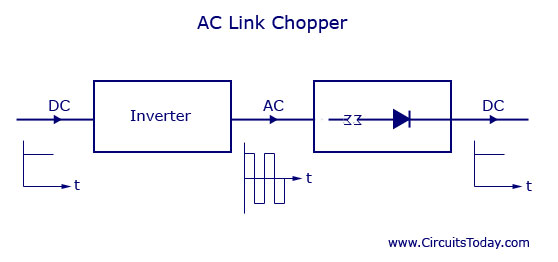
AC Link Chopper
i tilfælde af en ac link chopper konverteres første dc til ac ved hjælp af en inverter. Derefter intensiveres AC eller trækkes ned af en transformer, som derefter konverteres tilbage til dc af en diode-ensretter. Ac link chopper er dyrt, omfangsrig og mindre effektiv, da konverteringen sker i to faser.
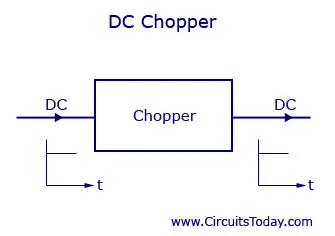
DC Chopper
en DC chopper er en statisk enhed, der konverterer fast dc indgangsspænding til en variabel dc udgangsspænding direkte. En chopper kan siges som dc-ækvivalent af en ac-transformer, da de opfører sig på en identisk måde. Denne form for choppere er mere effektive, da de involverer et trin konvertering. Ligesom en transformer kan en chopper bruges til at træde op eller ned ad den faste dc-udgangsspænding. Choppere bruges i mange applikationer over hele verden inden for forskellige elektroniske udstyr. Et chopper system har en høj effektivitet, hurtig respons og en jævn kontrol.
princippet om Chopper Operation
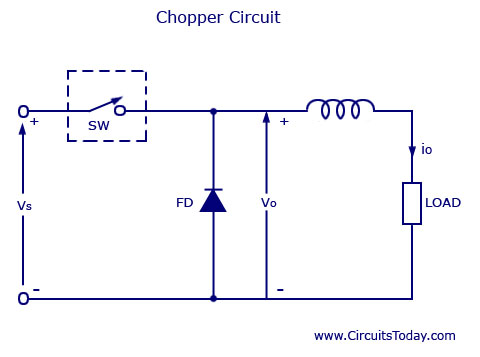
en chopper kan siges som en høj hastighed on/off halvlederkontakt. Kilde til indlæsning tilslutning og afbrydelse fra belastning til kilde sker i en hurtig hastighed. Overvej figuren, her kan en hakket belastningsspænding opnås fra en konstant jævnstrømsforsyning af spænding, som har en størrelse Vs. Chopper er den, der er repræsenteret af “SV” inde i en prikket firkant, som kan tændes eller slukkes efter ønske.
udgangsspænding og Strømbølgeformer
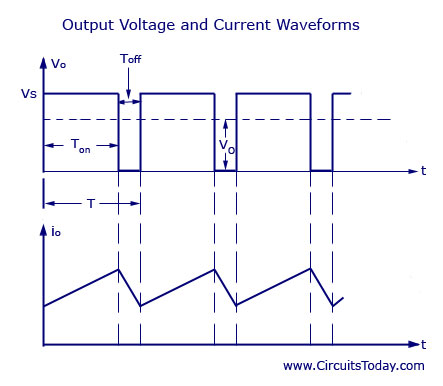
lad os nu tage et kig på udgangsstrøm og spændingsbølgeformer af en chopper. I løbet af tidsperioden Ton er chopper tændt, og belastningsspændingen er lig med kildespænding Vs. i løbet af intervallet Toff er chopper slukket, og belastningsstrømmen flyder gennem frihjulsdioden FD . Lastterminalerne er kortsluttet af FD, og belastningsspændingen er derfor nul under Toff. Således produceres en hakket dc-spænding ved belastningsterminalerne. Vi kan se fra grafen, at belastningsstrømmen er kontinuerlig. I løbet af tidsperioden Ton, belastningsstrøm stiger, men under toff belastningsstrøm henfalder .
gennemsnitlig belastningsspænding er givet af
V0 = Ton / (Ton +Toff) * Vs = (Ton/T) V = A Vs………………(1.0)
Ton: on-time
Toff : off – time
T = Ton +toff= snitperiode
a = Ton /T = arbejdscyklus
så vi ved, at belastningsspændingen kan styres ved at variere arbejdscyklussen A. ligning 1.0 viser, at belastningsspændingen er uafhængig af belastningsstrømmen, det kan også skrives som
V0 = f. Ton .Vs
f= 1 / T = snitfrekvens
Step – Up choppere
i tilfælde af chopperkredsløbet (se figur med navnet – “chopper circuit”) vist i begyndelsen af denne artikel, V0 eller den gennemsnitlige udgangsspænding er mindre end indgangsspændingen Vs, så denne type chopper kaldes en trin ned chopper. For en step-up chopper kan vi opnå en gennemsnitlig udgangsspænding V0 større end indgangsspænding. Figur (a) viser den elementære form af en step-up chopper.
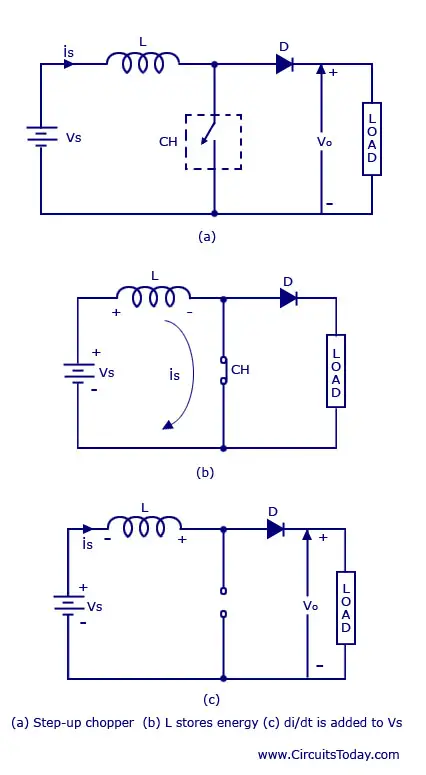
arbejdsprincip for en Step-Up Chopper
i step-up chopper en stor induktor, L er i serie med kildespændingen Vs. dette danner en lukket sti som vist i figuren (b). I løbet af tidsperioden Ton chopper er på induktoren lagrer energi. Når helikopteren er slukket, tvinges strømmen til at strømme gennem dioden og indlæse et stykke tid Toff, og da induktorstrømmen ikke pludselig kan dø. Når strømmen falder, vendes polariteten af emf induceret i L. Fig (c). Som et resultat er den samlede spænding, der er tilgængelig over belastningen, givet af ligningen V0 = Vs + L (di/dt) . Spændingen V0 overstiger kildespændingen, og kredsløbet fungerer derfor som en step-up chopper, og den energi, der er lagret i L, frigives til belastningen.
spænding og strømbølgeformer
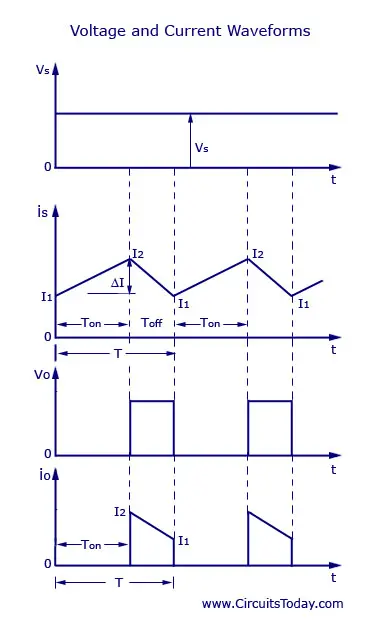
når chopper er tændt, vil strømmen gennem induktansen L stige fra I1 til i2. Som chopper er på kilden spænding påføres L, der er vL = VS .
når helikopteren er slukket, kan KVL for figuren (c) skrives som
vL – V0+Vs =0 eller vL =V0-Vs hvor vL er spændingen over L. Variation af kildespænding vS , kildestrøm er , belastningsspænding v0 og belastningsstrøm iO er skitseret i fig (d) . Lad os antage, at variationen af udgangsstrømmen er lineær, energiindgangen til induktoren fra kilden , i tidsperioden Ton, er
Vind= Vs (I1+I2/2) Ton
i løbet af tiden toff chopper er slukket, så energien frigivet af induktoren til belastningen er
ve = (V0-Vs)(I1+I2/2).Toff
lad os antage, at systemet er tabsløst, så siger de to energier, at sejr og Ve er ens.
så lig med disse to får vi
Vs (I1+I2/2) Ton = (V0-Vs)(I1+I2/2).Toff
Vs Ton = (V0-Vs) Toff
V0Toff = Vs (Toff + Ton) = Vs .T
V0 = VS (T / Toff) = VS (T/T-Ton) =VS (1 / (1-A) ………….(2.0)
fra ligningen 2.0 kan vi se, at gennemsnitsspændingen over belastningen kan øges ved at variere arbejdscyklussen. Hvis helikopteren i figuren (a) altid er slukket, a=0 og V0= Vs. Hvis helikopteren altid er tændt, a =1 og V0 = uendelig, som vi kan se fra grafen. I praktiske anvendelser chopper er tændt og slukket, således at den nødvendige step-up gennemsnitlige udgangsspænding, mere kildespænding opnås.
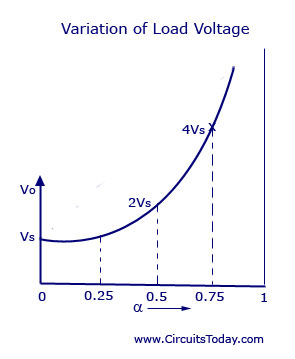
figur viser variation af belastningsspænding V0 med arbejdscyklus .
anvendelse af Step-up Chopper
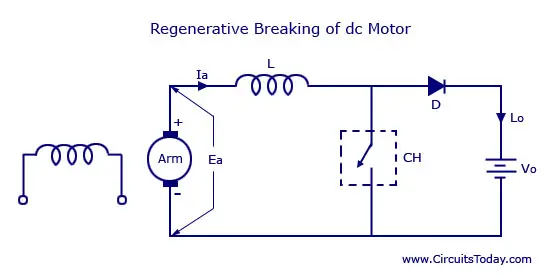
figur viser regenerativ bremsning af dc motor.
princippet om step-Up chopper kan bruges til regenerativ bremsning af DC-motorer. Armaturspændingen Ea er analogi med VS og spænding V0 er dc-kildespændingen. Når helikopteren er på induktoren l gemmer energien, og når den er slukket, frigiver induktoren energien. Hvis Ea / (1-a) overstiger V0 , fungerer dc-maskinen som en dc-generator, og ankerstrømmen strømmer i en retning modsat motortilstanden. Da strømmen nu strømmer fra dc-maskine til kilden V0, vil det medføre regenerativ brud på dc-motoren. Selv ved faldende motorhastigheder kan regenerativ brud tilvejebringes, da motorarmatur Ea er direkte proportional med feltstrømmen og motorhastigheden.